
More than six hours of driving
Raw data sources, such as colour cameras, LIDAR and both long and wide range radars
The development of the PREVENTION dataset has been supported by the BRAVE project of the European Union’s Horizon 2020 research and innovation programme under grant agreement Nº 723021
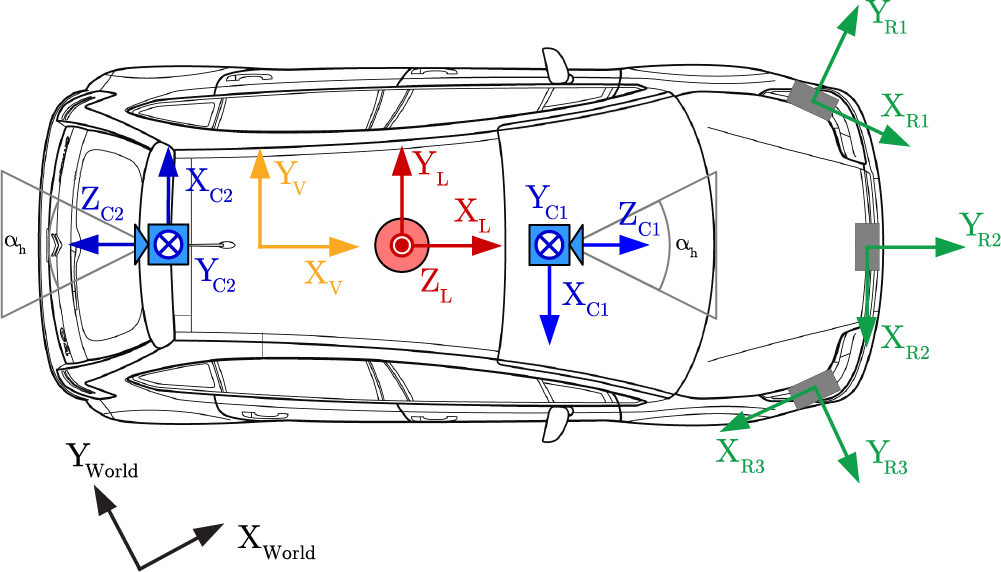
Our record setup at a glance
Find here some useful info about our sensors and data acquisition system
High-speed FHD+ Bayer camera
Velodyne HDL-32E LiDAR
ARS-308 Continental long-range radar
SRR-208 Continental wide-range radar
Trimble NetR9 Geospatial RTK DGNSS
MPU6050 IMU
Raw data ready to be downloaded
Find below our data recordings, classified by date.
An alternative by-parts download method is available for unstable connections.
RECORD1: recorded on 21th June 2018 [calib_data]

[DRIVE1_video_mp4_front] [DRIVE1_video_mp4_back]
[DRIVE1_video_raw_front] [DRIVE1_video_raw_back]
[DRIVE1_cloud]
[DRIVE1_processed_data]
RECORD2: recorded on 19th July 2018 [calib_data]
[DRIVE1_video_mp4_front] [DRIVE1_video_mp4_back]
[DRIVE1_video_raw_front] [DRIVE1_video_raw_back]
[DRIVE1_cloud]
[DRIVE1_processed_data]

[DRIVE2_video_mp4_front] [DRIVE2_video_mp4_back]
[DRIVE2_video_raw_front] [DRIVE2_video_raw_back]
[DRIVE2_cloud]
[DRIVE2_processed_data]
RECORD3: recorded on 24th June 2018 [calib_data]

[DRIVE1_video_mp4_front] [DRIVE1_video_mp4_back]
[DRIVE1_video_raw_front] [DRIVE1_video_raw_back]
[DRIVE1_cloud]
[DRIVE1_processed_data]

[DRIVE2_video_mp4_front] [DRIVE2_video_mp4_back]
[DRIVE2_video_raw_front] [DRIVE2_video_raw_back]
[DRIVE2_cloud]
[DRIVE2_processed_data]
RECORD4: recorded on 18th October 2018 [calib_data]

[DRIVE1_video_mp4_front] [DRIVE1_video_mp4_back]
[DRIVE1_video_raw_front] [DRIVE1_video_raw_back]
[DRIVE1_cloud]
[DRIVE1_processed_data]

[DRIVE2_video_mp4_front] [DRIVE2_video_mp4_back]
[DRIVE2_video_raw_front] [DRIVE2_video_raw_back]
[DRIVE2_cloud]
[DRIVE2_processed_data]

[DRIVE3_video_mp4_front] [DRIVE3_video_mp4_back]
[DRIVE3_video_raw_front] [DRIVE3_video_raw_back]
[DRIVE3_cloud]
[DRIVE3_processed_data]
RECORD5: recorded on 22th November 2018 [calib_data]

[DRIVE1_video_mp4_front] [DRIVE1_video_mp4_back]
[DRIVE1_video_raw_front] [DRIVE1_video_raw_back]
[DRIVE1_cloud]
[DRIVE1_processed_data]

[DRIVE2_video_mp4_front] [DRIVE2_video_mp4_back]
[DRIVE2_video_raw_front] [DRIVE2_video_raw_back]
[DRIVE2_cloud]
[DRIVE2_processed_data]

[DRIVE3_video_mp4_front] [DRIVE3_video_mp4_back]
[DRIVE3_video_raw_front] [DRIVE3_video_raw_back]
[DRIVE3_cloud]
[DRIVE3_processed_data]
C/C++ Development Kit
Find here useful C/C++ code to import and use our data.
Only OpenCV is required to compile our code.
Note that the images offered in the dataset as raw data are as-is, so you will have to take into consideration the corresponding distortion, according to the parameters of the corresponding intrinsic calibration matrix. Calibration data is properly used in our tool to undistort the images and set all reference systems correctly.
Lane change labeling | lane_changes.txt
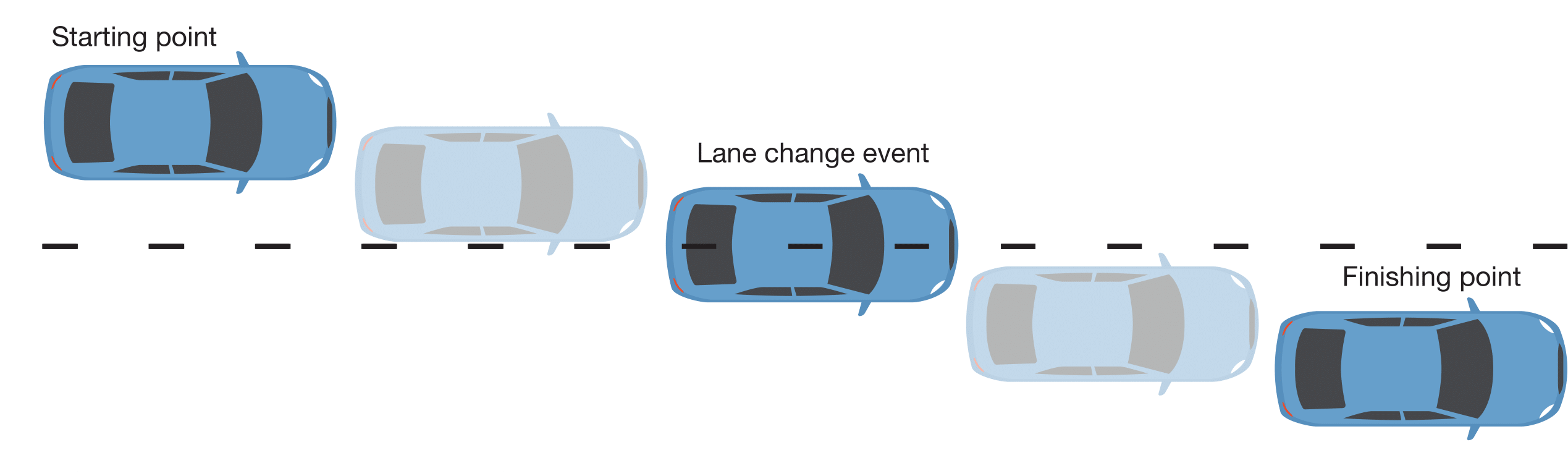
[ID ID_m LC_type f0 f1 f2 blinker]
Three stages of lane change maneuver:
- f0: starting point
- f1: lane change event, rear middle part of the vehicle just between the lanes
- f2: finishing point
- 3: left lane change
- 4: right lane change
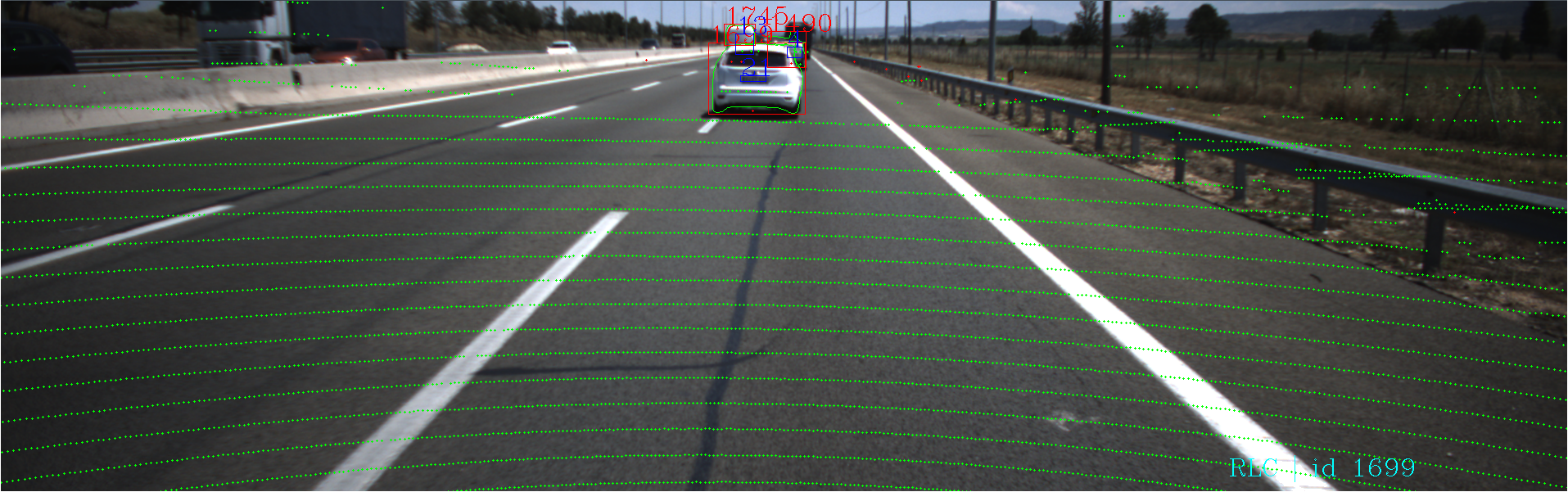
Lane labeling | lanes.txt
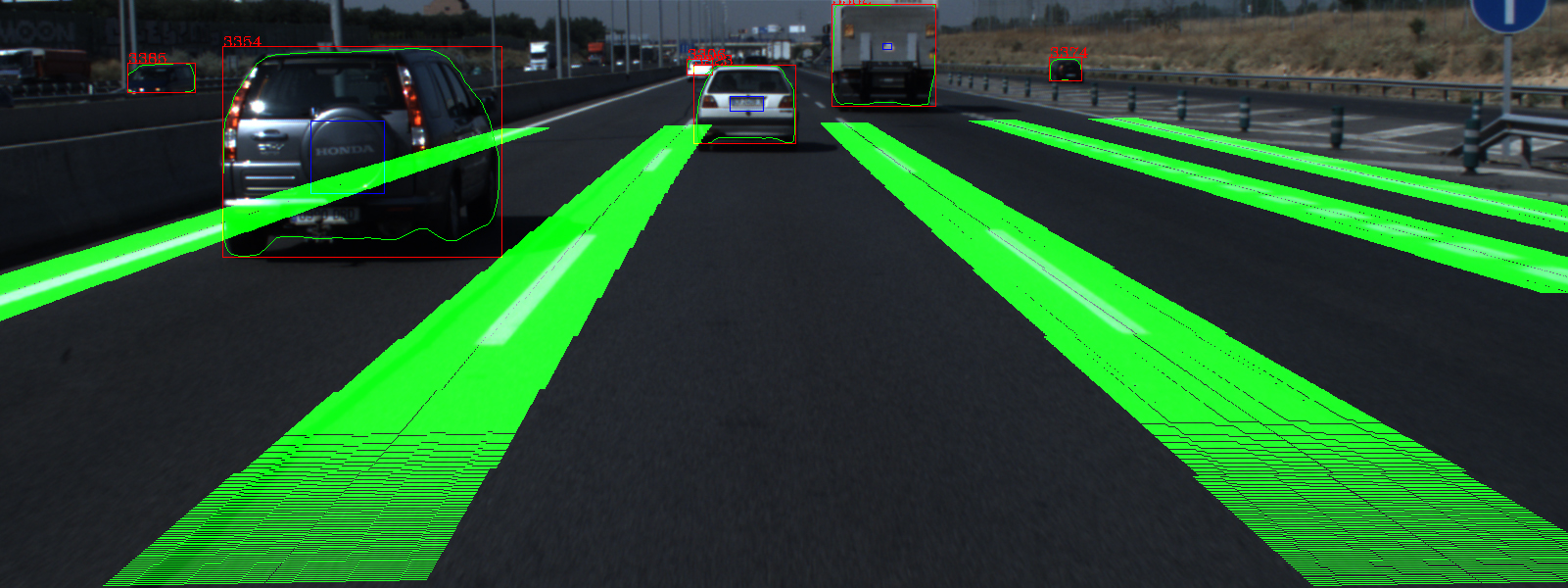
[frame laneID c0 c1 c2 c3 isDetected isPermanent counterThreshold]
- c0: lateral offset
- c1: angular error
- c2: curvature
- c3: curvature derivative
- isDetected: value 1 if the lane has been detected in the corresponding frame
- isPermanent: value 1 if if the lane has been maintained for at least 10 frames
- counterThreshold: represents the count of frames up or down used to set a threshold to set the lanes (defined at 10 frames) to activate and deactivate the isPermanent flag for that laneID
Labels | labels.txt
[frame id x y width height 0 0]
Trajectories | trajectories.txt
[frame vehicle_id u v x_cam y_cam z_cam x_laser y_laser z_laser]
Detections | detections.txt
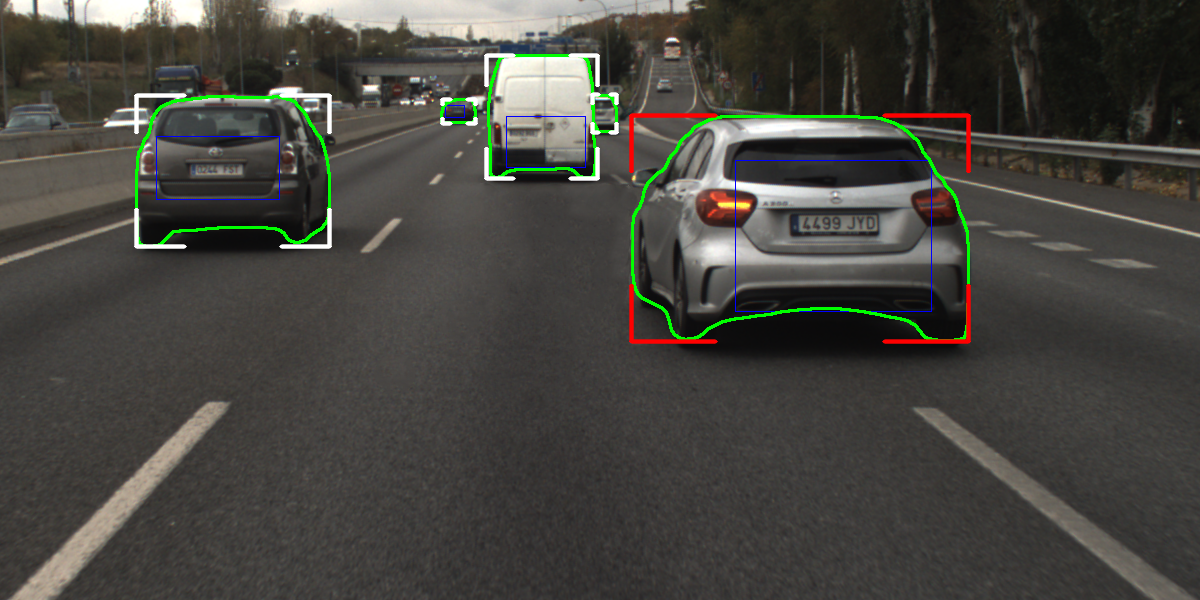
[frame id class xi yi xf yf conf n nContourValues]
Classes:
- 1: pedestrian
- 2: bicycle
- 3: car
- 4: motorcycle
- 6: bus
- 8: truck
Citation
Our paper was published at the IEEE ITSC 2019, you can download it by clicking on the preview image showed below.

If you are using our data for research purposes, we would be grateful if you cite us.
@INPROCEEDINGS{prevention_dataset,author={R. {Izquierdo} and A. {Quintanar} and I. {Parra} and D. {Fernández-Llorca} and M. A. {Sotelo}},
booktitle={2019 IEEE Intelligent Transportation Systems Conference (ITSC)},
title={The PREVENTION dataset: a novel benchmark for PREdiction of VEhicles iNTentIONs},
year={2019},
pages={3114-3121},
doi={10.1109/ITSC.2019.8917433},
month={Oct},
}
Know more about us
The INVETT (INtelligent VEhicles and Traffic Technologies) Research Group carries out its activity in the area of last-generation sensors for 3D High-resolution perception as well as intelligent systems at large. Our Lab is located in Politechnic School, External Campus, Universidad de Alcala
Copyright 
This web and its contents are copyrighted under the CC BY-NC-SA 4.0 license.
Indexing
This section is necessary for the dataset to be indexed by search engines.
| property | value | ||||||
|---|---|---|---|---|---|---|---|
| name | The PREVENTION Dataset |
||||||
| alternateName | The PREVENTION Dataset |
||||||
| url | https://prevention-dataset.uah.es/ |
||||||
| sameAs | https://prevention-dataset.invett.es/ |
||||||
| sameAs | https://prevention-dataset.uah.es/ |
||||||
| description | The PREVENTION Dataset collects data acquired by INVETT Research Group self-driving car -Citroën C4- in wide variety of scenarios and conditions. More than six hours of driving from raw data sources, such as colour cameras, LiDAR and both long and wide range RADARs. This dataset is focused on the development of prediction algorithms and applications that could anticipate the intention and trajectory of sorrounding vehicles. |
||||||
| provider |
| ||||||
| license |
|